 Photo by Fraunhofer IPA
Photo by Fraunhofer IPAAusgangssituation
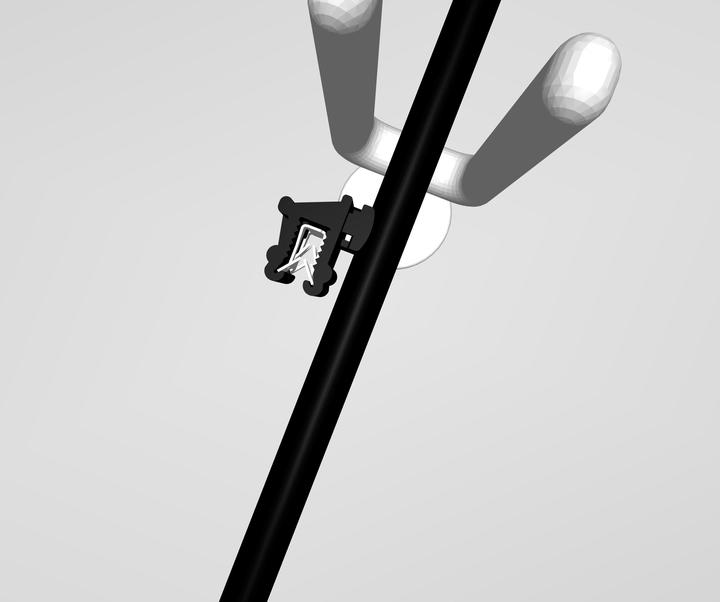
In der Automobilindustrie werden Karosserien mit komplexen Leitungssätzen ausgestattet, die auf Kundenwunsch gefertigt werden. Diese Leitungssätze werden mithilfe von Kunststoffclips an der Karosserie befestigt. Die Lage der Clips erlaubt eine gewisse Toleranz, ansonsten können die Clips nicht gesteckt werden. Um mögliche Lagefehler der unterschiedlichen Clips am Leitungssatz frühzeitig zu erkennen, soll ein Kamerasystem mithilfe von Maschinellem Lernen (ML) die Position in axialer Richtung sowie die Ausrichtung der Clips am Leitungssatz überprüfen. Dies spart kostenintensive Nacharbeit und steigert gleichzeitig die Qualität und Prozesssicherheit.
Lösungsidee
Methoden der klassischen Bildverarbeitung wurden bei Voruntersuchungen, z. B. aufgrund von Verdeckung, als bedingt tauglich befunden. Das bereits vorhandene Kamerasystem soll deshalb durch ML erweitert werden. In diesem Quick Check soll ein vereinfachter Teilleitungssatz mit zwei verschiedenen Arten von Befestigungsclips überprüft werden. Das Kamerasystem kann hierfür an einem Universal Robot (UR) 5 befestigt und an die benötigten Positionen gefahren werden. Es sollen die Abweichungen der Befestigungsposition in axialer Richtung auf +/- 5 Millimeter sowie eine rotatorische Abweichung im Toleranzbereich +/-30 Grad erkannt werden.
Nutzen
Leitungssätze werden individualisiert auf Kundenwunsch hergestellt. Die enorme Variantenvielfalt sowie komplexen Anforderungen erschweren eine Automatisierung und erfordern manuelle Arbeitsschritte. Um die Verlässlichkeit bei der Leitungssatzproduktion zu erhöhen, soll erstmals die Überprüfung einzelner Teilaspekte automatisiert werden. Diese Automatisierungslösung legt den Grundstein für weitere Möglichkeiten in einem Bereich, der von manuellen Arbeitsprozessen geprägt ist und ein hohes Potenzial aufweist.
Umsetzung der KI-Applikation
In diesem Anwendungsfall sollen zwei verschiedene Typen von Clips klassifiziert werden. In einem Fall wird geprüft, ob der Clip sich korrekt in der vorgesehenen Halterung befindet oder nicht. Im anderen Fall werden leicht gedrehte Clips oder falsch positionierte Clips inspiziert. Von den Clips werden jeweils Bilder aus drei verschiedenen Perspektiven erfasst und als Input für die Modelle verwendet. Mit den definierten Anforderungen erreicht das trainierte Modell eine 100%-ige Genauigkeit im Testset. Das Modell wurde auch mit Simulationsdaten trainiert, um den Aufwand für die Datenerfassung zu reduzieren. Hier konnte zunächst kein Mehrwert generiert werden.
Marcel Albus, PhD
Senior Automation Engineer / Lab Head
Automation Engineer and Scientist specializing in automated pharmaceutical laboratories, industrial automation, and robotics. With expertise in mathematical optimization, machine learning, and global automation engineering, backed by a PhD from University of Stuttgart and a strong background in software development and robotic assembly systems.