 Photo by Fraunhofer IPA
Photo by Fraunhofer IPAAusgangssituation
Die Firma Johann Maier fertigt und prüft höchstfeste und korrosionsbeständige Verbindungselemente in einzigartiger Qualität für die Luft- und Raumfahrt, die Erdölindustrie, den internationalen Motorsport sowie für die Verteidigungs- und Sicherheitsbranche.
Aufgrund der kundenindividuellen Designs und geringen Losgrößen erfolgt die Produktion weitgehendste mechanisiert, aber mit wenig Automatisierung hinsichtlich Maschinenbestückung und Logistik. Bedingt durch schwankende Nachfrage und fehlende Mitarbeiter kann Johann Maier seinen Maschinenpark nicht voll auslasten. Ein Nachrüsten der Maschinen hinsichtlich automatischer Bestückung durch den Maschinenhersteller kommt aufgrund des Alters der Maschinen nur teilweise in Frage.
Es wurden zwei Maschinentypen für den Schmiedeprozess von Schrauben identifiziert, bei denen eine Mensch-Roboter-Kollaborationsapplikation für Maschinenbestückung Sinn ergibt.
Lösungsidee
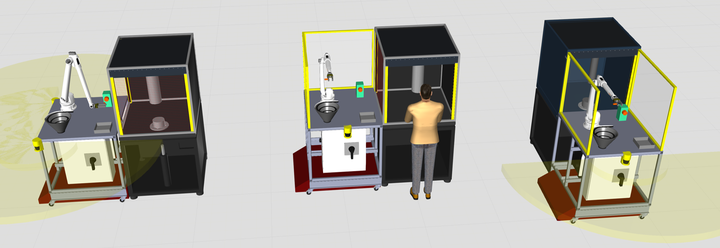
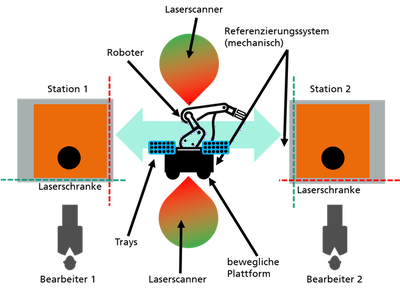
Im Rahmen des Quick Checks ist ein Konzept zur Bestückung der Maschinen für das Stanzen von Schraubenköpfe als kollaborative Applikation erarbeitet worden, das anschließend als Grundlage für ähnliche Applikationen bei anderen Maschinentypen dienen soll. Ein Roboterarm wird hierbei auf einer mobilen Basis an die Station herangeschoben und kann dann die Schraubenrohlinge in die Schmiedevorrichtung einsetzen. Die mobile Basis kann bei Bedarf an verschiedene Stationen angedockt werden, oder aufgrund ihres kompakten Designs auch kurzzeitig abgestellt werden.
Nutzen
Die mobile Plattform dient hierbei als Prototyp für einen kollaborativen Arbeitsplatz beim Schmiedeprozess der Schraubenrohlinge. Die Unterstützung durch das autonome Bestücken und Fetten der Bearbeitungsmaschine sowie eine anschließende Aufnahme der Schraubenrohlinge in ein Tray erlaubt einem Bearbeiter die Bearbeitung unterschiedlicher Prozesse gleichzeitig. Zusätzlich ist der Bearbeiter frei eine zweite Station zu bedienen.
Die Plattform kann ebenfalls genutzt werden um Aufträge mit größeren Stückzahlen vollautonom abzuarbeiten, dies bietet Potential für zusätzliche Gewinnoptimierung.
Umsetzung der KI-Applikation
Die Schraubenrohlinge werden als Schüttgut in einem Tray an den Schmiedeprozess angeliefert und mithilfe einer Bin-Picking-Lösung vereinzelt. Hierbei unterstützen Methoden des maschinellen Lernens die Sicherheit und Präzision der Applikation, da die Bin-Picking-Lösung an die Produkte angepasst werden kann. Dies erlaubt eine vollautonome Vereinzelung der Rohlinge für zusätzliche Flexibilität im Produktionsprozess sowie die Parallelisierung weiterer wertschöpfender Prozesse.
Marcel Albus, PhD
Senior Automation Engineer
Automation Engineer and Scientist specializing in automated pharmaceutical laboratories, industrial automation, and robotics. With expertise in mathematical optimization, machine learning, and global automation engineering, backed by a PhD from University of Stuttgart and a strong background in software development and robotic assembly systems.