Towards scalability for resource reconfiguration in robotic assembly line balancing problems using a modified genetic algorithm
 Marcel Albus
Marcel AlbusAbstract
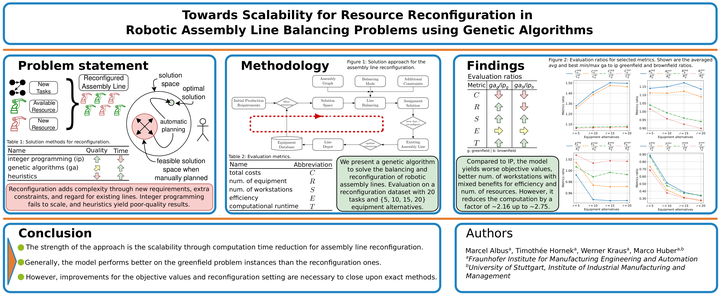
Assembly lines are still one of the most used manufacturing systems in modern-day production. Most research affects the building of new lines and, less frequently, the reconfiguration of existing lines. However, the first is insufficient to meet the reconfigurable production paradigm required by volatile market demands. Consequent reconfiguration of resources by production requests affects companies' competitiveness. This paper introduces a problem-specific genetic algorithm for optimizing the reconfiguration of a Robotic Assembly Line Balancing Problem with Task Types, including additional company constraints. First, we present the greenfield and brownfield optimization objectives, then a mathematical problem formulation and the composition of the genetic algorithm. We evaluate our model against an Integer Programming baseline on a reconfiguration dataset with multiple equipment alternatives. The results demonstrate the capabilities of the genetic algorithm for the greenfield case and showcase the possibilities in the brownfield case. With a scalability improvement through computation time decrease of up to ~2.75×, reduced number of equipment and workstations, but worse objective values, the genetic algorithm holds the potential for reconfiguring assembly lines. However, the genetic algorithm has to be further optimized for the reconfiguration to leverage its full potential.
Marcel Albus, PhD
Senior Automation Engineer / Lab Head
Automation Engineer and Scientist specializing in automated pharmaceutical laboratories, industrial automation, and robotics. With expertise in mathematical optimization, machine learning, and global automation engineering, backed by a PhD from University of Stuttgart and a strong background in software development and robotic assembly systems.